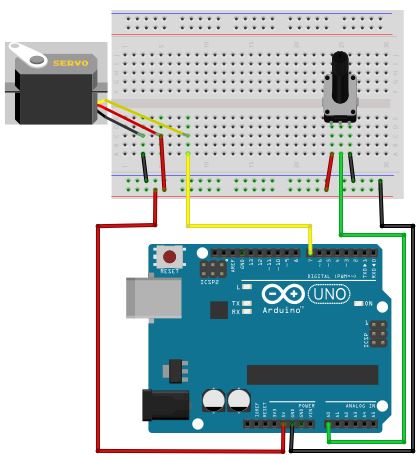
Aufbau der Schaltung
|
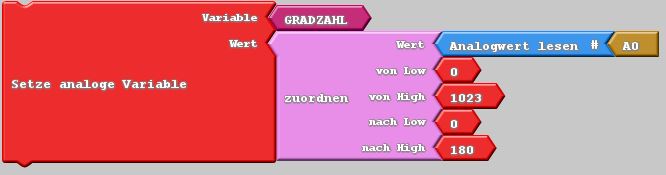
Das ArduBlock-Programm

oder


oder 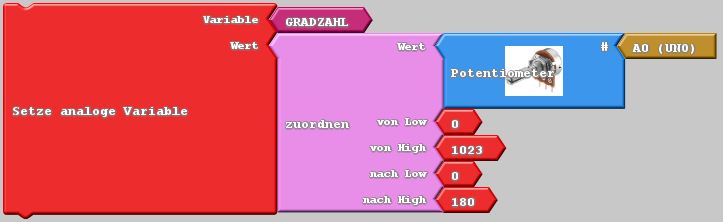
Eine Variable mit dem Namen „GRADZAHL“ wird erstellt.
Die Spannung am analogen Eingang A0 wird gemessen (0 – 5V) und in einen Wert von 0 bis 1023 umgewandelt.
Diese Zahl wird in einen Wert umgewandelt zwischen 0 und 180 – Die Gradzahl für den Servomotor.

Das ist der eigentliche Befehl, für den Servomotor: Der Servomotor an Pin 7 wird so angesteuert, dass er sich um den Wert der Gradzahl dreht.

Zur Kontrolle werden am seriellen Monitor die Buchstaben „Winkel“ und der Wert der Variablen „GRADZAHL“ ausgegeben.